- OBJ + MTL et FBX pour l'import dans des DCC (Blender, Maya, 3ds Max) et des moteurs de jeu (Unreal Engine, Unity)
- glTF/GLB pour les flux web et la visualisation en ligne
- E57 pour les nuages de points dans les contextes BIM et relevé patrimonial
- Alembic pour les pipelines VFX qui gèrent des géométries animées
Sommaire
Cet article vous plaît ?
Partagez-le !
Temps de lecture estimé : 8min
💡 L'essentiel à retenir :
- Le choix d'un logiciel de photogrammétrie se structure autour de cinq axes : le cas d'usage (drone topo/SIG, archi/patrimoine, scan d'objets, VFX), les livrables attendus (orthomosaïque, DEM/DSM, nuage dense, mesh texturé), les exigences de précision (GCP, RTK/PPK, contrôle qualité), les contraintes matérielles (GPU, VRAM, RAM, OS) et le modèle de licence (perpétuelle, abonnement, open source, cloud).
- Commencer par définir la précision métier requise oriente directement vers une famille de solutions : les usages topo/drone exigent la gestion native des GCP et des exports géospatiaux (GeoTIFF, LAS/LAZ), là où un pipeline VFX priorise la qualité mesh, les UV et la compatibilité DCC.
- Avant tout achat, tester le logiciel de photogrammétrie sur un jeu de données représentatif reste la méthode la plus fiable pour valider la précision, les temps de traitement et la qualité des livrables dans le contexte réel.
Obtenez des devis pour un logiciel de topographie
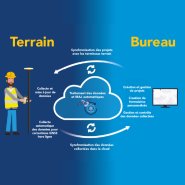
Le choix d’un logiciel de photogrammétrie influence directement la qualité des modèles 3D, la précision des relevés et l’efficacité des traitements de données topographiques. La sélection d’une solution de photogrammétrie adaptée repose sur différents critères : niveau de précision recherché, volume d’images à traiter, compatibilité avec l’infrastructure existante, capacités d’automatisation et modèle de licence. Une analyse rigoureuse de ces paramètres permet d’identifier le logiciel de photogrammétrie le plus pertinent pour les besoins de cartographie, de topographie, de modélisation 3D ou d’inspection technique.

Quels livrables attendre d’un logiciel de photogrammétrie ?
Livrables cartographiques et géospatiaux pour drone, topo et SIG
Les professionnels de la topographie, du SIG et du drone attendent des sorties directement exploitables dans leurs chaînes métier. Les exports fréquents dans ces contextes incluent :
- L'orthomosaïque géoréférencée au format GeoTIFF, compatible QGIS, ArcGIS et supports cartographiques
- Le MNS/MNT (Modèle Numérique de Surface / de Terrain) exporté en GeoTIFF raster ou en maillage triangulé (TIN)
- Le nuage de points dense en LAS ou LAZ, avec attributs de couleur et métadonnées de précision
- Les courbes de niveau et rapports de précision exploitables dans les logiciels CAO/SIG

Livrables 3D pour archi/patrimoine, objets, VFX et jeux
Pour les usages de modélisation 3D, les sorties attendues sont différentes et les critères de qualité également. Les formats les plus courants sont :

Les contraintes propres à ces usages portent sur la qualité des UV (dépliage automatique vs manuel), la résolution des textures (de 4K à 16K selon les besoins), le nombre de polygones et la compatibilité de l'export avec les étapes de retopologie et de texture baking. Un maillage photogrammétrique brut dépasse souvent plusieurs millions de faces : vérifier que le logiciel gère la simplification de maillage nativement ou permet un export propre vers des outils de retopologie reste décisif pour un pipeline VFX.
Vous êtes fournisseur de logiciel de topographie ?
Recevez des demandes de devis qualifiées de pros en recherche active.
Des milliers de demandes chaque mois. Zéro prospection à froid.
Recevoir des leads
Quels critères techniques pour choisir un logiciel de photogrammétrie ?
Précision, GCP, RTK/PPK et contrôle d'échelle
La précision d'un projet photogrammétrique dépend autant de la méthode d'acquisition que du logiciel, mais certains outils offrent une gestion significativement plus fine du géoréférencement. Questions à poser avant achat :
- Le logiciel importe-t-il nativement les coordonnées RTK/PPK depuis les métadonnées EXIF ou un fichier externe ?
- Gère-t-il les GCP (Ground Control Points) avec importation de fichiers de levé topo (CSV, TXT) et affichage des résidus ?
- Produit-il un rapport qualité avec RMSE par GCP et par point de contrôle indépendant ?
- Prend-il en charge plusieurs systèmes de projection pour les projets multi-zones ?
- Permet-il l'ajustement du modèle de distorsion caméra (Brown, fisheye, équirectangulaire) ?

- Si l'usage exige une précision planimétrique inférieure à 5 cm, alors il convient de vérifier que le logiciel de photogrammétrie gère les corrections d'altitude géoïde et les projections locales.
- S'il faut traiter des données RTK sans GCP (workflow PPK-only), alors il est important de vérifier les conditions de précision garanties sans points d'appui et la gestion des dérives verticales.
- Si le commanditaire exige un rapport de conformité, alors il faut vérifier que le logiciel de photogrammétrie génère un rapport PDF exportable avec statistiques de reprojection.
Qualité de reconstruction selon les scènes difficiles
Les algorithmes de dense matching ne se comportent pas de la même façon face aux scènes à faible texture, aux surfaces réfléchissantes ou aux végétations denses. Les cas difficiles à anticiper et leurs conséquences :
- Les surfaces brillantes (verre, métal poli, eau) génèrent des trous dans le nuage dense et des artefacts sur le mesh.
- La végétation produit des nuages incohérents entre deux passages si le vent a bougé les feuilles.
- Les façades répétitives (briques, bardages réguliers) induisent des erreurs d'alignement des photos.
- Les zones sous-exposées ou surexposées dégradent la détection des points d'intérêt.

Performance, GPU/CPU, RAM/VRAM et traitement cloud
Le matériel disponible détermine les temps de traitement et, dans certains cas, la faisabilité du projet en local.
Points à vérifier sur la configuration matérielle : la compatibilité CUDA (NVIDIA uniquement pour la plupart des solutions de bureau), le support du multi-GPU, les besoins en RAM système (32 Go minimum pour les projets de taille moyenne, 64 Go et plus pour les projets volumétriques) et la gestion des processeurs Apple Silicon (M-series) qui exclut CUDA et réduit les options logicielles.
| Contexte | Local recommandé | Cloud adapté |
|---|---|---|
| Moins de 200 photos, station avec GPU NVIDIA CUDA | Oui, traitement rapide | Inutile |
| 500 à 1 000 photos, GPU 8 Go VRAM | Faisable, nuit possible | Option utile |
| Plus de 1 000 photos ou Mac sans GPU CUDA | Limité ou impossible en local | Fortement recommandé |
| Traitement récurrent, volume industriel | Pipeline CLI/batch dédié | Architecture hybride |

Automatisation, batch, CLI et reproductibilité
Pour les organisations qui traitent plusieurs projets par semaine ou qui doivent garantir une chaîne reproductible, les capacités d'automatisation deviennent des critères décisifs. Les fonctionnalités à rechercher comprennent :
- La gestion de lots (batch processing) avec paramètres enregistrables par type de projet
- L'interface en ligne de commande (CLI) ou les API Python/REST pour l'intégration dans des pipelines existants
- La journalisation des traitements (logs horodatés, erreurs, statistiques de qualité)
- La reprise automatique en cas d'interruption sur de longs traitements
Intégrations SIG/BIM et formats d'export
L'insertion du logiciel de photogrammétrie dans l'écosystème existant conditionne l'efficacité globale du pipeline. Voici les intégrations typiques à vérifier :
- Connexion directe ou plugin vers QGIS et ArcGIS (import nuage LAS, orthomosaïque GeoTIFF)
- Export vers les logiciels BIM (Autodesk ReCap, Revit, Bentley ContextCapture en tant que format cible)
- Compatibilité avec les outils CAO topo (AutoCAD Civil 3D, MicroStation)
- Flux vers les plateformes de visualisation 3D (Sketchfab, Potree pour les nuages de points web)

FAQ
Un logiciel open source peut-il atteindre la précision d'une solution commerciale ?
OpenDroneMap et Meshroom peuvent atteindre des niveaux de précision comparables à des outils commerciaux sur des projets bien configurés, à condition de maîtriser les paramètres avancés. La différence se situe davantage dans la fiabilité du support, la maturité des interfaces et la facilité de mise en œuvre répétable que dans les algorithmes de base, qui partagent souvent les mêmes fondements théoriques.
Est-il possible de faire de la photogrammétrie de précision sur Mac ?
Oui, mais avec des contraintes significatives. L'absence de GPU NVIDIA CUDA sur les Mac Apple Silicon exclut l'accélération matérielle de la plupart des logiciels. Agisoft Metashape propose une version Mac fonctionnelle, mais les temps de traitement sont plus longs. La stratégie la plus opérationnelle consiste à externaliser le traitement lourd vers un service cloud compatible.
Quelle différence entre Pix4Dmapper et Pix4Dmatic ?
Pix4Dmapper est la solution historique orientée topo drone avec une interface de traitement complète et une gestion fine des GCP. Pix4Dmatic est une solution plus récente conçue pour les gros volumes et les workflows distribués, avec un moteur de traitement repensé pour la scalabilité. Les deux peuvent coexister selon les types de missions. Les conditions de licence et les fonctionnalités spécifiques sont à vérifier directement sur le site Pix4D.
La correction RTK suffit-elle à se passer de GCP ?
Le RTK/PPK améliore significativement la précision de géoréférencement et peut suffire pour certains usages cartographiques. Cependant, pour les projets à exigences réglementaires strictes ou à tolérances centimétriques, des points d'appui restent recommandés comme vérification indépendante. La qualité dépend aussi de la qualité de la correction différentielle et de la couverture du réseau de base.
Combien de photos un ordinateur standard peut-il traiter ?
Un PC avec 32 Go de RAM, un processeur récent et un GPU NVIDIA avec 8 Go de VRAM traite généralement 200 à 400 photos en qualité élevée en quelques heures. Au-delà de 500 photos, les temps s'allongent significativement et les ressources deviennent un goulot d'étranglement. La volumétrie exacte dépend du logiciel, de la résolution des images et des paramètres de qualité choisis.
Quelle est la différence entre un MNS et un MNT en photogrammétrie drone ?
Le MNS (Modèle Numérique de Surface) représente toutes les surfaces visibles, végétation et bâtiments inclus. Le MNT (Modèle Numérique de Terrain) représente uniquement le sol nu, après filtrage de la végétation et du bâti. La génération d'un MNT de qualité à partir de la seule photogrammétrie est difficile sous couvert végétal dense ; les logiciels les plus avancés proposent des outils de filtrage, mais le LiDAR reste supérieur pour la pénétration du couvert.
Comment choisir entre traitement local et cloud ?
Le traitement local convient aux projets de moins de 500 photos sur une station équipée d'un GPU NVIDIA récent, aux contextes où la confidentialité des données exclut le cloud, et aux workflows nécessitant une intervention manuelle régulière. Le cloud convient aux projets volumétriques, aux équipes sans GPU puissant, aux utilisateurs Mac et aux workflows entièrement automatisés. Un modèle hybride (préparation en local, traitement en cloud) est souvent la solution la plus flexible.
Le rolling shutter affecte-t-il vraiment la précision ?
Oui, le rolling shutter des capteurs CMOS bon marché introduit des distorsions géométriques car les lignes de l'image ne sont pas capturées au même instant. Cet effet est amplifié lors de déplacements rapides du drone. Les logiciels comme Agisoft Metashape proposent une option de correction dédiée. Pour les projets de précision, un drone équipé d'un obturateur global (global shutter) élimine ce problème à la source.



Nos logiciels de topographie les plus populaires sur hellopro.fr



 Logiciel zeiss caligo - pour mesurer des surfaces gauches
Logiciel zeiss caligo - pour mesurer des surfaces gauches
Prix sur demande
Envoyer un message
 Logiciel Cartographie SIG - Suite ArpentGIS®
Logiciel Cartographie SIG - Suite ArpentGIS®
Prix sur demande
Envoyer un message