Sommaire
Cet article vous plaît ?
Partagez-le !
Temps de lecture estimé : 3min
Le robot cartésien est un outil industriel polyvalent. Sa conception linéaire et sa grande précision, similaires à un robot à portique, permettent d’optimiser les processus de fabrication et de recherche dans l’industrie moderne. Un robot cartésien peut en effet effectuer des tâches répétitives avec une grande vitesse et une faible consommation d’énergie. Pour en savoir plus sur le coût, il est utile de comparer le prix d'un robot cartésien 3 axes auprès de différents fournisseurs.
La différence entre les robots polaire et cartésien est principalement basée sur leur conception et leur champ d'application. Un robot cartésien se compose de quatre éléments principaux : une structure de base, des moteurs, un système de transmission et un système de contrôle.
Obtenez des devis pour un robot cartésien
Comment fonctionne un robot cartésien ?
Le fonctionnement d’un robot cartésien repose sur ses quatre éléments.
La structure de base
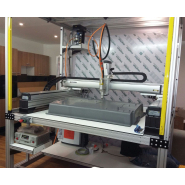
La structure d’un robot cartésien est composée de rails linéaires, sur lesquels se déplacent des chariots portant des outils ou des charges. Les rails sont orientés selon les axes X, Y et Z, permettant au robot d’atteindre n’importe quel point dans un espace tridimensionnel, notamment les robots 3 axes. Selon la configuration souhaitée, les rails peuvent être fixés :
- Au sol
- Au plafond
- Au mur.
Par ailleurs, un robot cartésien 2 axes ne peut se limiter qu'aux mouvements X et Y uniquement.

Les moteurs
Les deux types de moteurs couramment utilisés sont contrôlés par des signaux électriques envoyés par le système de contrôle. Ces sont :
- Les servomoteurs, des moteurs à courant continu qui peuvent tourner à des vitesses variables et s’arrêter à des positions précises.
- Les moteurs pas à pas, des moteurs électriques qui se déplacent par petits angles fixes, appelés « pas ».
Le système de transmission
C’est l’élément qui transmet le mouvement du moteur au chariot. Il existe trois types de systèmes de transmission :
- Les courroies crantées, des bandes en caoutchouc ou en métal qui s’engrènent avec des poulies fixées aux moteurs et aux chariots. Elles permettent un mouvement rapide et silencieux.
- Les vis à billes, des tiges filetées qui tournent avec les moteurs et entraînent des écrous fixés aux chariots. Elles permettent un mouvement précis et sans jeu.
- Les crémaillères, des barres dentées qui s’engrènent avec des pignons fixés aux moteurs et aux chariots. Elles permettent un mouvement linéaire sans limites de course.
Le système de contrôle
C’est l’élément qui programme et coordonne le fonctionnement du robot cartésien. Il existe deux types de systèmes de contrôle.
- Les contrôleurs, des dispositifs électroniques qui reçoivent des instructions sous forme de codes ou de signaux. Ils les convertissent en impulsions électriques pour les moteurs. Ils peuvent être intégrés au robot ou être externes.
- Les commandes numériques, des ordinateurs qui exécutent des logiciels spécifiques pour le pilotage du robot. Ils peuvent être connectés au robot par un câble ou par une liaison sans fil.

Vous êtes fournisseur de robots cartésiens ?
Recevez des demandes de devis qualifiées de pros en recherche active.
Des milliers de demandes chaque mois. Zéro prospection à froid.
Recevoir des leads
Quelles sont les applications d’un robot cartésien ?
Les applications d’un robot cartésien sont nombreuses et variées, en fonction de l’outil ou de la charge utile qu’il porte. Le robot XY, cependant, possède des caractéristiques uniques qui le distinguent des robots cartésiens traditionnels.
Industrie manufacturière
Le robot cartésien peut effectuer des tâches de pick-and-place. Il peut également assembler des composants, tels que des pièces mécaniques, électroniques et plastiques. Pour cela, il est équipé :
- De pinces
- De ventouses
- D’aimants.
Laboratoires et recherche
Le robot cartésien peut pipeter et distribuer des liquides. En utilisant des supports adaptés, il peut également manipuler des échantillons, tels que :
- Des tubes à essai
- Des plaques de culture
- Des microscopes
Impression et gravure
En utilisant un faisceau laser, une fraise, des têtes d’impression à jet d’encre ou à sublimation, le robot cartésien peut :
- Imprimer des images, des textes ou des motifs sur différents supports (du papier, du tissu ou du métal).
- Graver des formes ou des inscriptions sur divers matériaux (du bois, du verre ou du plastique).
Inspection et test
Le robot cartésien peut utiliser des caméras ou des capteurs :
- Pour inspecter des pièces (des circuits imprimés, des soudures ou des assemblages).
- Pour détecter des défauts (des fissures, des rayures ou des déformations).
- Pour tester des composants électroniques (des résistances, des condensateurs ou des transistors).